Flip the Plesiosaur Robot
The world's most scientifically-accurate plesiosaur robot.
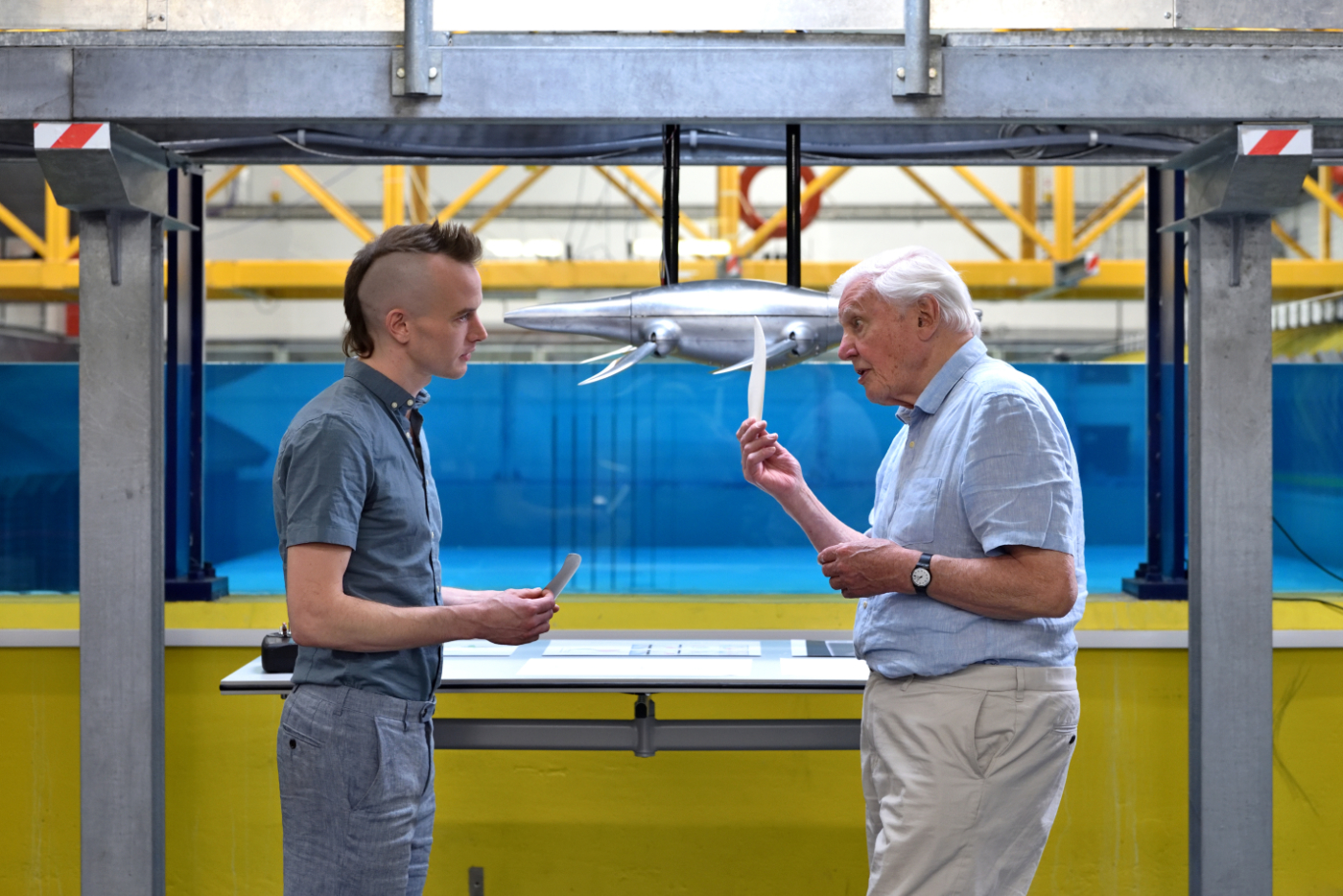
Flip the plesiosaur robot was designed as a continuation of my research at Southampton, building on earlier concepts while moving toward a more accurate and realistic robotic platform. The project aimed to translate theoretical and experimental research into a physical system that more closely represents real-world behaviour.
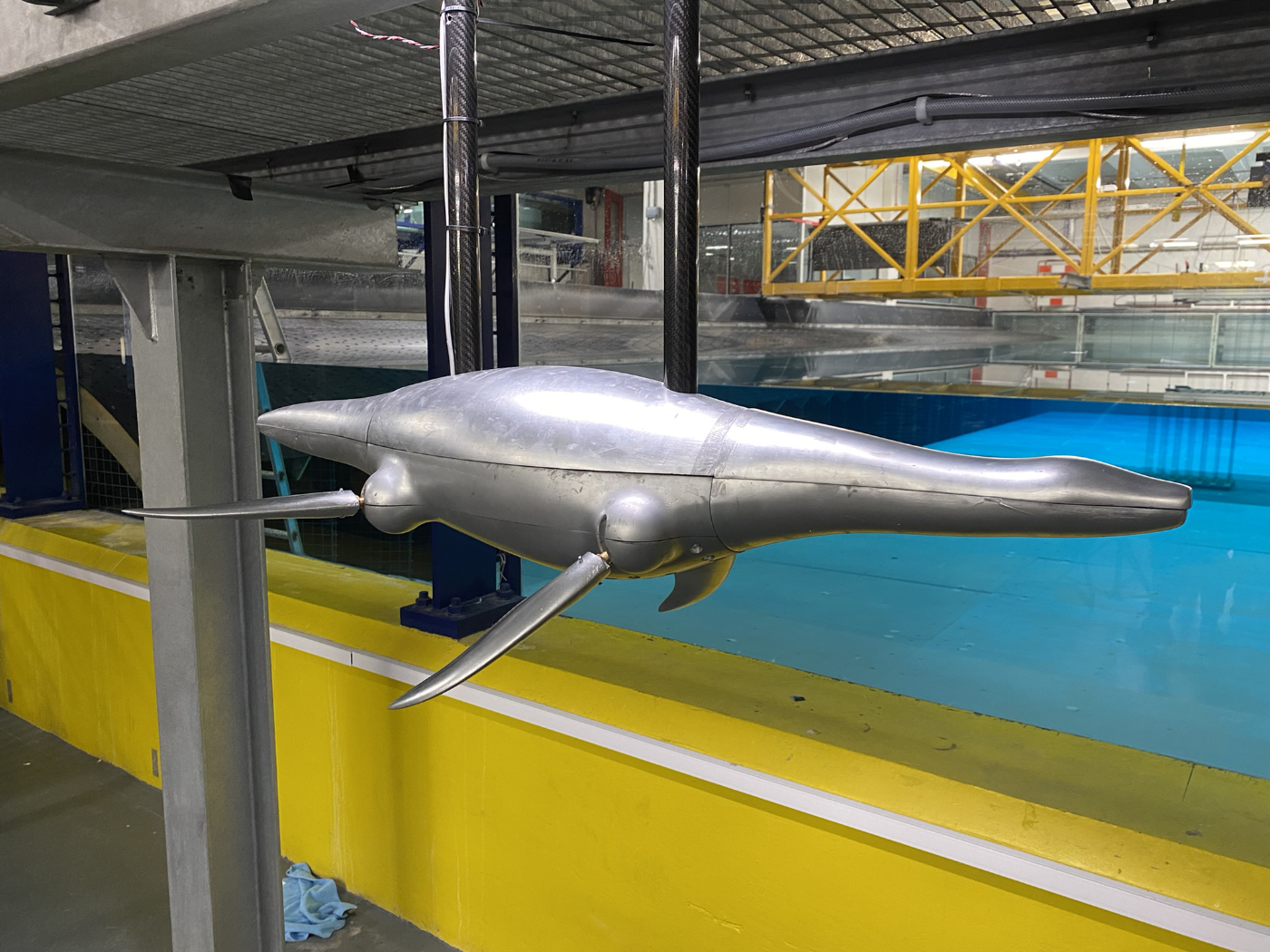
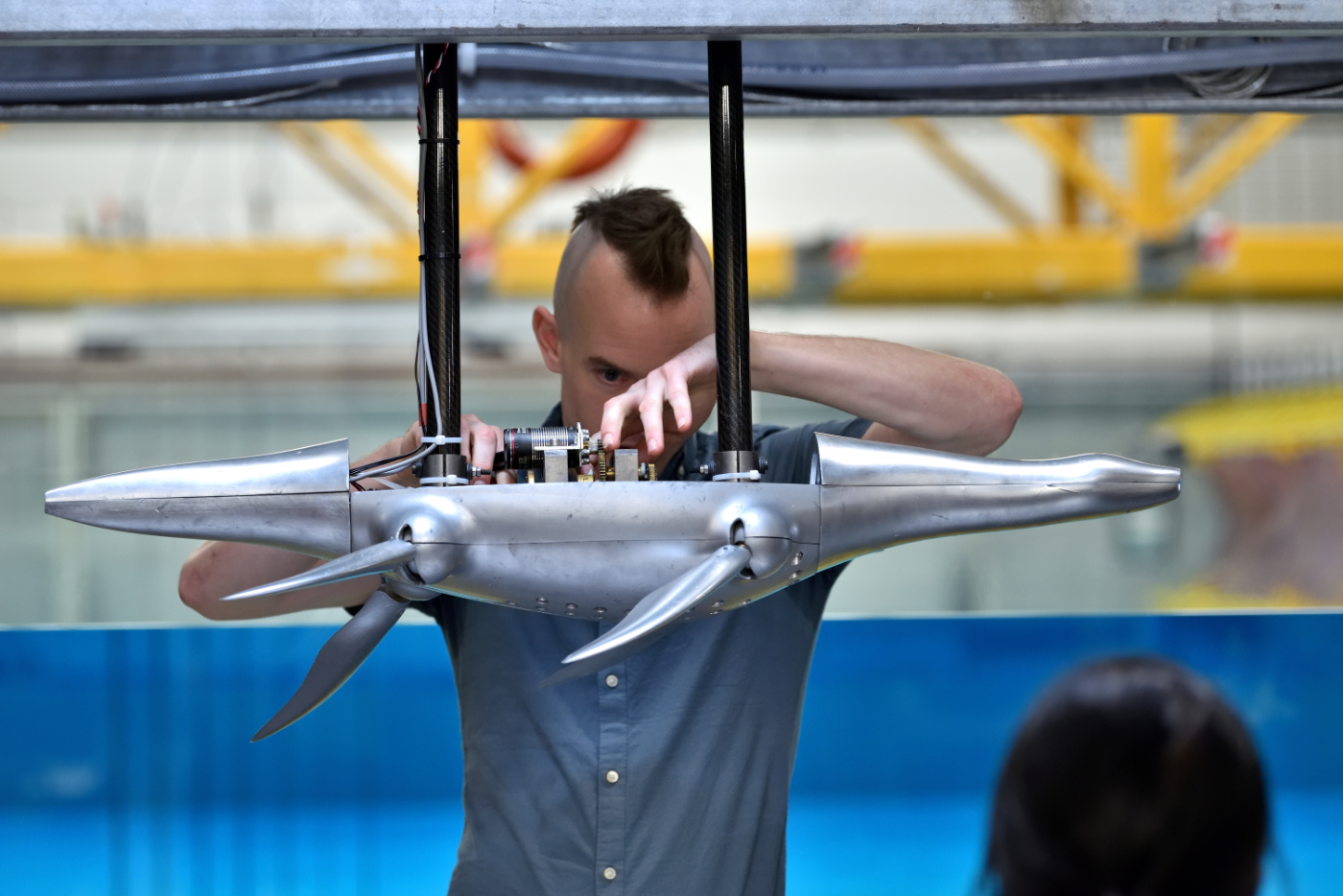
The robot incorporates improved geometry, actuation, and structural design to better capture the motion and dynamics of a plesiosaur-inspired swimming mechanism.
Compared to earlier prototypes, this version places greater emphasis on realism, robustness, and repeatability, allowing more meaningful testing and demonstration.
Compared to earlier prototypes, this version places greater emphasis on realism, robustness, and repeatability, allowing more meaningful testing and demonstration.
By combining research-driven design with a tangible robotic system, Flip provides a platform for exploring bio-inspired locomotion in greater depth.
It also serves as a bridge between academic research and practical demonstration, making complex hydrodynamic and robotic principles more accessible to a wider audience.
